光栅数字传感器
光栅是由很多等节距的透光缝隙和不透光的刻线均匀相间摆放构成的光电器材。依照作业原理,光栅可分为物理光栅和计量光栅,物理光栅依据光栅的衍射现象,常用于光谱分析和光波长等丈量;计量光栅是使用光栅的莫尔条纹现象进行丈量的器材,常用于位移的精细丈量。
按用处和结构方式,计量光栅又可分为丈量线位移的长光栅和丈量角位移的圆光栅。实践使用时,计量光栅又有透射光栅和反射光栅之分,透射光栅是在通明光学玻璃上均匀刻制出平行等距离的条纹构成的,而反射光栅则是在不透光的金属载体上刻制出等距离的条纹所构成。本节首要评论透射式计量光栅。
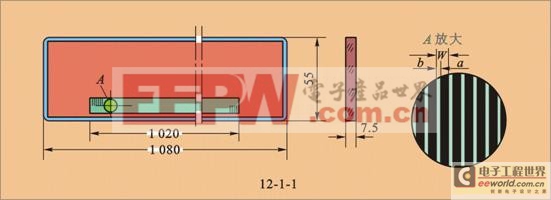
透射光栅的结构如图12.1.1所示,a为刻线(不透光)宽度,b为缝隙(透光)宽度, W = a+b称为光栅的栅距,一般a=b,也可做成a:b=1.1:0.9。常用的透射光栅的刻线条线,刻线的密度由丈量精度决议。
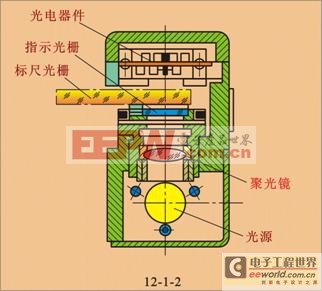
光栅数字传感器,一般由光源5(聚光镜4)、计量光栅、光电器材3及丈量电路等部分组成,如图12.1.2所示。计量光栅由标尺光栅1(主光栅)和指示光栅2组成,因而计量光栅又称光栅副,它决议了整个体系的丈量精度。一般主光栅和指示光栅的刻线密度相同,但主光栅要比指示光栅长得多。丈量时主光栅与被测目标连在一起,并随其运动,指示光栅固定不动,因而主光栅的有用长度决议了传感器的丈量规模。
将主光栅与标尺光栅堆叠放置,两者之间坚持很小的空隙,并使两块光栅的刻线之间有一个细小的夹角θ,如图12.1.3所示。当有光源照耀时,由于挡光效应(对刻线条/mm的光栅)或光的衍射效果(对刻线条/mm的光栅),与光栅刻线大致笔直的方向上构成明暗相间的条纹。在两光栅的刻线重合处,光从缝隙透过,构成亮带;在两光栅刻线的错开的当地,构成暗带;这些明暗相间的条纹称为莫尔条纹。
当指示光栅不动,主光栅的刻线与指示光栅刻线之间始终坚持夹角θ,而使主光栅沿刻线的笔直方向作相对移动时,莫尔条纹将沿光栅刻线方向移动;光栅反向移动,莫尔条纹也反向移动。主光栅每移动一个栅距W,莫尔条纹也相应移动一个距离S。因而经过丈量莫尔条纹的移动,就能丈量光栅移动的巨细和方向,这要比直接对光栅进行丈量简略得多。
,K=573,相当于将栅距扩大了573倍。因而,莫尔条纹的扩大倍数相当大,能够完成高灵敏度的位移丈量。
莫尔条纹是由光栅的许多刻线一起构成的,对刻线差错具有均匀效应,能在很大程度上消除由于刻线差错所引起的部分和短周期差错影响,能够抵达比光栅自身刻线精度更高的丈量精度。因而,计量光栅特别适合于小位移、高精度位移丈量。
由于光栅刻线夹角θ能够调理,因而能够依据需求改动θ的巨细来调理莫尔条纹的距离,这给实践使用带来了便利。
主光栅和指示光栅的相对位移产生了莫尔条纹,为了丈量莫尔条纹的位移,有必要经过光电器材(如硅光电池等)将光信号转换成电信号。
在光栅的恰当方位放置光电器材,当两光栅作相对移动时,光电器材上的光强随莫尔条纹移动,光强改变为正弦曲线所示。在a方位,两个光栅刻线堆叠,透过的光强最大,光电器材输出的电信号也最大;在c方位由于光被遮去一半,光强减小;方位d的光被彻底遮去而满足黑,光强最小;若光栅持续移动,透射到光电器材上的光强又逐步增大。光电器材上的光强改变近似于正弦曲线,光栅移动一个栅距W,光强改变一个周期。光电器材的输出电压可用公式表明为
经过整形电路,将正弦信号转变成方波脉冲信号,则每经过一个周期输出一个方波脉冲,这样脉冲总数N就与光栅移动的栅距数相对应,因而光栅的位移为
![]()
不管丈量直线位移仍是丈量角位移,都有必要能够依据传感器的输出信号判别移动的方向,即判别是正向移动仍是反向移动,是顺时针旋转仍是逆时针旋转。
可是,仅有一个光电元件的输出无法判别光栅的移动方向,由于在一点调查时,不管主光栅向哪个方向运动,莫尔条纹均作明暗替换改变。为了辨别方向,一般选用在相隔1/4莫尔条纹距离

的方位上安放两个光电元件,取得相位差为90º的两个信号,然后送到如图12.1.5所示的辨向电路进行处理。
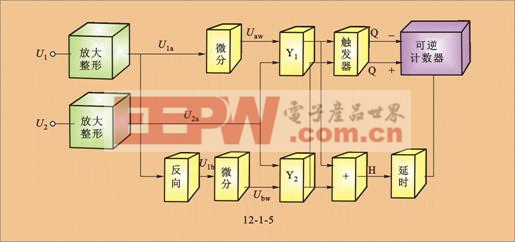
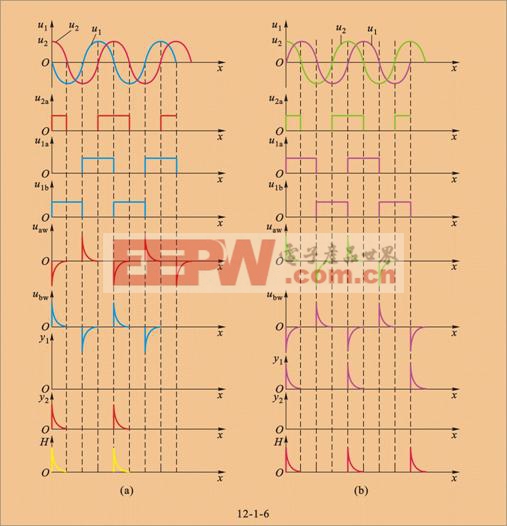
假定当主光栅向左移动时,莫尔条纹向上移动,两个光电元件别离输出电压信号U1和U2,如图12.1.6(a),经过扩大、整形,得到两个相位差为
也为高电平,故答应脉冲经过,并触发加减操控触发器使之置1,可逆计数器对与门Y`输出的脉冲进行加法计数。同理,当标尺光栅向右移动时,输出信号波形如图12.1.6(b)所示,与门Y2被堵塞,Y1输出脉冲信号使触发器置0,可逆计数器对与门Y2输出的脉冲进行减法计数。主光栅每移动一个栅距,辨向电路只输出一个脉冲。计数器所计的脉冲个数即代表光栅的位移。
光栅数字传感器的丈量分辨率等于一个栅距。可是,在精细检测中常常需求丈量比栅距更小的位移量,为了进步分辨率,能够选用两种办法完成:1)添加刻线密度来减小栅距,可是这种办法受光栅刻线)选用细分技能,使光栅每移动一个栅距时输出均匀分布的n个脉冲,然后得到比栅距更小的分度值,使分辨力进步到
![]()
细分的办法有多种,如直接细分、电桥细分、锁相细分、调制信号细分、软件细分等。下面介绍常用的直接细分办法。
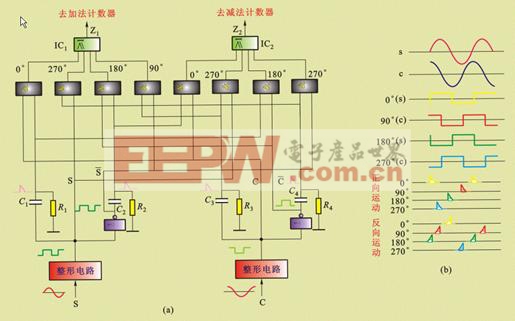
直接细分又称方位细分,常用细分数为4,因而也称为四倍频细分。图12.1.7给出了一种四倍频细分电路及其波形。在上述辨向电路的基础上,将取得的两个相位相差90º的正弦信号别离整形和反相,就可得到4个相位依次为0°(S)、90º(C)、180º(


)的方波信号,经RC微分电路后就可在光栅移动一个栅距时,得到均匀分布的4个计数脉冲,再送到可逆计数器进行加法或减法计数,这样可将分辩率进步4倍。
四倍频细分的长处是电路简略,对莫尔条纹信号的波形无严格要求,其缺陷是细分数不高。选用电桥细分、调制信号细分、锁相细分等可有用进步细分数,有关细分电路请参阅其他材料。
光栅数字传感器具有丈量精度高,分辨率高,丈量规模大,动态特性好,适合于非触摸式动态丈量,易于完成自动操控,广泛用于数控机床和精细丈量设备中。可是光栅在工业现场使用时,对作业环境要求较高,不能接受大的冲击和振荡,要求密封,以避免尘土、油污和铁屑等的污染,本钱较高。
图12.1.8所示为光栅数字传感器用于数控机床的方位检测和方位闭环操控体系框图。由操控体系生成的方位指令Pc操控作业台移动。作业台移动过程中,光栅数字传感器不断检测作业台的实践方位
=Pc时,则P=0,表明作业台已抵达指令方位,伺服电动机停转,作业台精确地停在指令方位上。